799 Views
Mobility
The airbag can also save the life of motorcyclists
The vulnerability of motorcyclists to a possible accident can be reduced with new garments
At this point everyone knows that autonomous vehicles will have a fundamental role, maybe even a starring role, in the future of mobility –although there are still many doubts and problems to be solved in this field.
The most relevant are probably those related to safety. Even before addressing the ethical dilemmas concerning a vehicle that must make certain decisions, the technology for these machines must be capable of preventing any kind of accident.
For example, can they avoid running over a pedestrian who suddenly gets in their way? A group of Australian researchers has been studying this matter and has developed technology that allows these kinds of cars to detect pedestrians even when they are behind another vehicle or even behind a building.
The system –developed as part of a program financed by the iMOVE Cooperative Research Centre, the Australian Centre for Field Robotics of the University of Sydney, and the Cohda Wireless interconnected vehicles firm– allows autonomous vehicles to anticipate the risk of running a pedestrian down or of a collision with other vehicles by offering what its developers call “x-ray vision that even reaches blind points.”
According to Cohda, the system is based on technology called cooperative or collective perception (CP). This perception uses units that exchange information on the road that allow vehicles to share what they can see from their position with other automobiles via a V2X (Vehicle-to-Everything) communications system.
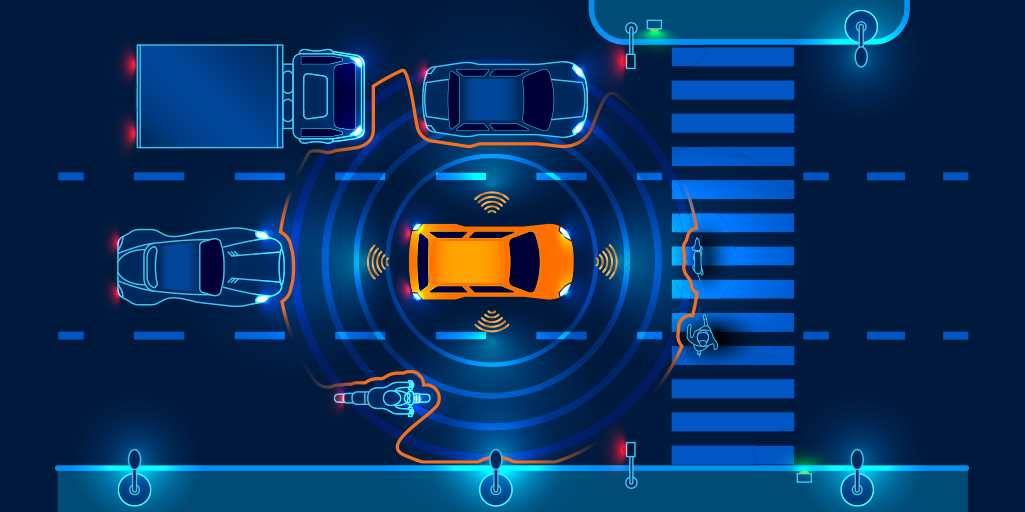
In this way, a vehicle can add to its own information the real time information detected by other vehicles that are moving in the area, thus generating a more detailed x-ray of the surroundings and making it possible to predict certain situations.
“This is a change in the rules for both autonomous vehicles and for those driven by humans, which we hope will substantially improve the efficiency and safety of highway transportation,” says professor Eduardo Nebot of the Australian Centre for Field Robotics.
According to Nebot, and after different experiments, collective perception allows a vehicle connected to this network to detect a pedestrian hidden behind a building: “Seconds before the car’s localized perception centers and the driver could see that pedestrian behind the building, the collective perception detected his presence, thus giving additional time to both the driver and the vehicle’s navigation system to react in the face of the possible risk of running someone down.”
The researchers also claim that this kind of system helps connected autonomous vehicles to take preventive measures with regard to the expected behavior of pedestrians. For example, braking and stopping at a zebra crossing when a pedestrian approaches.